Application of Derivatives
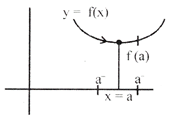
- Continuity and Differentiability of a function: Let a function \[y=f(x)\] is said to be continuous at
\[x=a\] then \[\underset{x\to {{a}^{-}}}{\mathop{\lim }}\,f(x)=\underset{x\to {{a}^{+}}}{\mathop{\lim }}\,\,\,f(x)=f(a)\]
Generally, a function is said to be continuous at \[x=a\] when the graph of that function can be drawn/sketched without lefting the pencil.
- Differentiation: The process of finding out the differentiability/derivatives of the function \[y=f(x)\]in the interval (a, b) is said to be differentiation.
- Derivatives of f(x): Let \[y=f(x)\] is continuous in interval [a, b]. Let a point \[c\in (a,b)\]
Then function \[y=f(x)\] is differentiable at \[x=c\]
i.e. \[\underset{x\to c}{\mathop{\lim }}\,\frac{f(x+c)-(c)}{c}=f'(c)\]
Solved Example
Find derivative of \[y=\sin x.\] by 1st principle:
Let \[y=f(x)=\sin x\] ...(1)
Let \[\delta \]x be the small increment in x then \[\delta \]y be the corresponding increment in y.
\[y+\delta y=\sin (x+\delta x)\] ...(2)
Now, on subtracting equation (1) from (2), we get
\[y+\delta y-y=\sin (x+\delta x)-\sin x\]
\[\delta y=2.\cos \frac{x+\delta x+x}{2}.\sin \left( \frac{x+\delta x+x}{2} \right)\]
Dividing \[\delta \]x on both sides and taking limit \[\delta x\to 0,\]we get
\[\underset{\delta x\to 0}{\mathop{\lim }}\,\frac{\delta y}{\delta x}=\underset{\delta x\to 0}{\mathop{\lim }}\,2.\frac{\cos \left( \frac{2x+\delta x}{2} \right).\sin \left( \frac{\delta x}{2} \right)}{\delta x}\]
\[\frac{dy}{dx}\underset{\delta x\to 0}{\mathop{\lim }}\,2.\cos \left( x+\frac{\delta x}{2} \right).\left( \frac{\sin \frac{\delta x}{2}}{\frac{\delta x}{2}\times 2} \right)\]
On applying limit \[\delta x\to 0,\]we get
\[\frac{dy}{dx}=\cos x\times 1=\cos x\left[ \underset{\theta \to 0}{\mathop{\lim }}\,\frac{\sin \theta }{\theta }=1 \right]\]
Thus,\[\frac{d}{dx}(\sin x)=\cos x\]
\[\frac{dy}{dx}\]is said to be differential coefficient of \[y=f(x).\] It is denoted by\[{{y}_{1}}\]or f \['(x)\]
\[\frac{d}{dx}(\sin x)=\cos x\]
\[\frac{d}{dx}(\cos x)=-\sin x\]
\[\frac{d}{dx}(\tan x)={{\sec }^{2}}x\]
\[\frac{d}{dx}(\cot x)=-\cos e{{c}^{2}}x\]
\[\frac{d}{dx}(\sec x)=\sec x\tan x\]
\[\frac{d}{dx}(\cos ec\,x)=-\cos ec\,x.\cot x\]
\[\frac{d}{dx}({{x}^{n}})=n{{x}^{n-1}}\]
\[\frac{d}{dx}({{e}^{x}})={{e}^{x}}\]
\[\frac{d}{dx}(\log x)=\frac{1}{x}\]
\[\frac{d}{dx}(si{{n}^{-1}}x)=\frac{1}{\sqrt{1-{{x}^{2}}}}\]
\[\frac{d}{dx}(co{{s}^{-1}}x)=\frac{-1}{\sqrt{1-{{x}^{2}}}}\]
\[\frac{d}{dx}(ta{{n}^{-1}}x)=\frac{1}{1+{{x}^{2}}}\]
\[\frac{d}{dx}(x)=1\]
\[\frac{d}{dx}(C)=0\] where \[C=\]any const.
\[\frac{d}{dx}(\sin ax)=a\,\text{cos}\,ax\]
\[\frac{d}{dx}({{a}^{x}})={{a}^{x}}.\log a\]
- Some Basic Rules of Differentiation
\[\frac{d}{dx}(u\,\pm v)=\frac{d}{dx}(u)\pm \frac{d}{dx}(v)\]where u and v be the function of x.
\[\frac{d}{dx}(C.u)=C.\frac{d}{dx}(u)\] where \[C=\]any const.
e.g. \[\frac{d}{dx}(5{{x}^{2}})=5.\frac{d}{dx}({{x}^{2}})=5[2.{{(x)}^{2-1}}]=10{{x}^{1}}=10x\]
\[\frac{d}{dx}(u.v.)=u.\frac{d\text{v}}{dx}+\frac{du}{dx}\]
e.g. \[\frac{d}{dx}({{e}^{x}}.\sin x)={{e}^{x}}.\frac{d}{dx}(\sin x)+\sin x\frac{d}{dx}({{e}^{x}})={{e}^{x}}\cos x+\sin x.{{e}^{x}}\]
\[={{e}^{x}}(\cos x+\sin x)\]
\[\frac{d}{dx}\left( \frac{u}{\text{v}} \right)=\frac{\text{v}.\frac{du}{dx}-u.\frac{d\text{v}}{dx}}{{{\text{v}}^{2}}}\] e.g. \[\frac{d}{dx}\left( \frac{{{x}^{2}}}{\sin x} \right)_{\text{v}}^{u}=\frac{\sin x\frac{d}{dx}({{x}^{2}})-{{x}^{2}}\frac{d}{dx}(\sin x)}{{{\sin }^{2}}x}\]
\[\frac{d}{dx}(lo{{g}_{c}}{{a}^{x}})=\frac{d}{dx({{a}^{x}})}(\log {{a}^{x}}).\frac{d}{dx}({{\underline{a}}^{x}})=\frac{1}{{{a}^{x}}}.{{a}^{x}}.\log a=\log a\]
Geometrical meaning of derivative at point: The derivative of a function \[f(x)\] at a point \[x=a\] is the of the tangent of the curve \[y=f(x)\] at the point \[(a,f(a)).\]
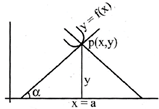
Let us consider a curve \[y=f(x)\] & take a point P\[(x,y)\] on it. We draw the tangent to the curve at \[P(x,y)\]which makes an angle \[\alpha \] with positive direction of x-axis. Then,
\[{{\left. \frac{dy}{dx} \right|}_{\,\,at\,\,P(x,y)\,=\,tan\,\,\alpha \,=\,m(say)}}\]
It is said to be gradient or slope of the tangent to the curve \[y=f(x)\]at\[p(x,y)\].
- Equation of the tangent: The equation of the tangent to a curve \[y=f(x)\] at the given point \[P({{x}_{1}},{{y}_{1}})\] is written in point slope form of the equation of straight more...
 ·
·
 Note: The points at which the function attains either its maximum value or minimum value are said to be the extreme points of the function. Both the local maximum value and local minimum value of the function is said to be extreme value of the function.
It is also said to be the relative maximum value and relative minimum value of the function respectively.
Note: The points at which the function attains either its maximum value or minimum value are said to be the extreme points of the function. Both the local maximum value and local minimum value of the function is said to be extreme value of the function.
It is also said to be the relative maximum value and relative minimum value of the function respectively.
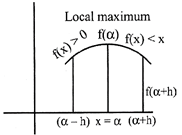 Let\[x=\alpha \]at any point
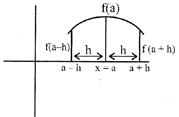
(a) If \[f'(x)\] changes sign from positive to negative as x increase through a then\[x=\alpha \]is point of maximum.
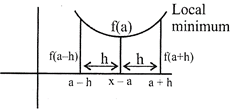
(b) If \[f'(x)\] changes sign from negative to positive as x increase through\[\alpha \]. Then\[x=\alpha \]is said to be the point of the minimum.
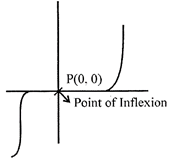
(c) If \[f'(x)\] does not change the sign as x increases through \[\alpha ,\] then\[x=\alpha \] is neither the point of maximum nor the point of minimum. Hence it is said to be the point of inflexion.
Let\[x=\alpha \]at any point
(a) If \[f'(x)\] changes sign from positive to negative as x increase through a then\[x=\alpha \]is point of maximum.
(b) If \[f'(x)\] changes sign from negative to positive as x increase through\[\alpha \]. Then\[x=\alpha \]is said to be the point of the minimum.
(c) If \[f'(x)\] does not change the sign as x increases through \[\alpha ,\] then\[x=\alpha \] is neither the point of maximum nor the point of minimum. Hence it is said to be the point of inflexion.
 ·
·
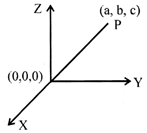 Consider P(a, b, c) be any point in the space at length r from the origin to the axis. Here a, b and c are said to be direction ratios.
\[\therefore OP=\sqrt{{{a}^{2}}+{{b}^{2}}+{{c}^{2}}}\] (By distance formula)
\[|r|=\sqrt{{{a}^{2}}+{{b}^{2}}+{{c}^{2}}}\]
Note: Direction cosine is proportional to the direction ratio.
Let a, b, c be d.r.,s of the line OP and its d.c.'s be \[\ell \],m and n respectively.
Then \[\frac{\ell }{a}=\frac{m}{b}=\frac{n}{c}=K\] (say)
Convesion from direction ratios (d.r.'s) to direction cosines (d.c.'s)
\[\ell =\pm \frac{a}{\sqrt{{{a}^{2}}+{{b}^{2}}+{{c}^{2}}}}\]
\[m=\pm \frac{b}{\sqrt{{{a}^{2}}+{{b}^{2}}+{{c}^{2}}}}\] and \[n=\pm \frac{c}{\sqrt{{{a}^{2}}+{{b}^{2}}+{{c}^{2}}}}\]
Consider P(a, b, c) be any point in the space at length r from the origin to the axis. Here a, b and c are said to be direction ratios.
\[\therefore OP=\sqrt{{{a}^{2}}+{{b}^{2}}+{{c}^{2}}}\] (By distance formula)
\[|r|=\sqrt{{{a}^{2}}+{{b}^{2}}+{{c}^{2}}}\]
Note: Direction cosine is proportional to the direction ratio.
Let a, b, c be d.r.,s of the line OP and its d.c.'s be \[\ell \],m and n respectively.
Then \[\frac{\ell }{a}=\frac{m}{b}=\frac{n}{c}=K\] (say)
Convesion from direction ratios (d.r.'s) to direction cosines (d.c.'s)
\[\ell =\pm \frac{a}{\sqrt{{{a}^{2}}+{{b}^{2}}+{{c}^{2}}}}\]
\[m=\pm \frac{b}{\sqrt{{{a}^{2}}+{{b}^{2}}+{{c}^{2}}}}\] and \[n=\pm \frac{c}{\sqrt{{{a}^{2}}+{{b}^{2}}+{{c}^{2}}}}\]







