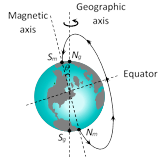
 (1) The magnetic field of earth is similar to one which would be obtained if a huge magnet is assumed to be buried deep inside the earth at it's centre.
(2) The axis of rotation of earth is called geographic axis and the points where it cuts the surface of earth are called geographical poles \[({{N}_{g}},\,Sq)\]. The circle on the earth's surface perpendicular to the geographical axis is called equator.
(3) A vertical plane passing through the geographical axis is called geographical meridian.
(4) The axis of the huge magnet assumed to be lying inside the earth is called magnetic axis of the earth. The points where the magnetic axis cuts the surface of earth are called magnetic poles. The circle on the earth's surface perpendicular to the magnetic axis is called magnetic equator.
(5) Magnetic axis and Geographical axis don't coincide but they make an angle of \[{{17.5}^{o}}\] with each other.
(6) Magnetic equator divides the earth into two hemispheres. The hemisphere containing south polarity of earth's magnetism is called northern hemisphere while the other, the southern hemisphere.
(7) The magnetic field of earth is not constant but changes irregularly from place to place on the surface of the earth and even at a given place it varies with time too.
(8) Direction of earth's magnetic field is from S (geographical south) to N (geographical north).
(1) The magnetic field of earth is similar to one which would be obtained if a huge magnet is assumed to be buried deep inside the earth at it's centre.
(2) The axis of rotation of earth is called geographic axis and the points where it cuts the surface of earth are called geographical poles \[({{N}_{g}},\,Sq)\]. The circle on the earth's surface perpendicular to the geographical axis is called equator.
(3) A vertical plane passing through the geographical axis is called geographical meridian.
(4) The axis of the huge magnet assumed to be lying inside the earth is called magnetic axis of the earth. The points where the magnetic axis cuts the surface of earth are called magnetic poles. The circle on the earth's surface perpendicular to the magnetic axis is called magnetic equator.
(5) Magnetic axis and Geographical axis don't coincide but they make an angle of \[{{17.5}^{o}}\] with each other.
(6) Magnetic equator divides the earth into two hemispheres. The hemisphere containing south polarity of earth's magnetism is called northern hemisphere while the other, the southern hemisphere.
(7) The magnetic field of earth is not constant but changes irregularly from place to place on the surface of the earth and even at a given place it varies with time too.
(8) Direction of earth's magnetic field is from S (geographical south) to N (geographical north). 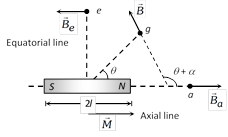 (b) On equatorial position : \[{{B}_{e}}=\frac{{{\mu }_{0}}}{4\pi }\frac{M}{{{({{r}^{2}}+{{l}^{2}})}^{3/2}}}\]; If \[l<<r\,;\] then \[{{B}_{e}}=\frac{{{\mu }_{0}}}{4\pi }\frac{M}{{{r}^{3}}}\]
(c) General position : In general position for a short bar magnet \[{{B}_{g}}=\frac{{{\mu }_{0}}}{4\pi }\frac{M}{{{r}^{3}}}\sqrt{(3{{\cos }^{2}}\theta +1)}\]
(3) Bar magnet in magnetic field : When a bar magnet is left free in an uniform magnetic field, if align it self in the directional field.
(i) Torque : \[\tau =MB\sin \theta \Rightarrow \overrightarrow{\tau }=\overrightarrow{M}\times \overrightarrow{B}\]
(ii) Work : \[W=MB(1-\cos \theta )\]
(iii) Potential energy : \[U=-MB\cos \theta =-\overrightarrow{M}\,.\,\overrightarrow{B}\]; (\[\theta =\] Angle made by the dipole with the field)
(4) Gauss's law in magnetism : Net magnetic flux through any closed surface is always zero i.e. \[\oint{\overrightarrow{B}.\overrightarrow{ds}=0}\]
(b) On equatorial position : \[{{B}_{e}}=\frac{{{\mu }_{0}}}{4\pi }\frac{M}{{{({{r}^{2}}+{{l}^{2}})}^{3/2}}}\]; If \[l<<r\,;\] then \[{{B}_{e}}=\frac{{{\mu }_{0}}}{4\pi }\frac{M}{{{r}^{3}}}\]
(c) General position : In general position for a short bar magnet \[{{B}_{g}}=\frac{{{\mu }_{0}}}{4\pi }\frac{M}{{{r}^{3}}}\sqrt{(3{{\cos }^{2}}\theta +1)}\]
(3) Bar magnet in magnetic field : When a bar magnet is left free in an uniform magnetic field, if align it self in the directional field.
(i) Torque : \[\tau =MB\sin \theta \Rightarrow \overrightarrow{\tau }=\overrightarrow{M}\times \overrightarrow{B}\]
(ii) Work : \[W=MB(1-\cos \theta )\]
(iii) Potential energy : \[U=-MB\cos \theta =-\overrightarrow{M}\,.\,\overrightarrow{B}\]; (\[\theta =\] Angle made by the dipole with the field)
(4) Gauss's law in magnetism : Net magnetic flux through any closed surface is always zero i.e. \[\oint{\overrightarrow{B}.\overrightarrow{ds}=0}\] 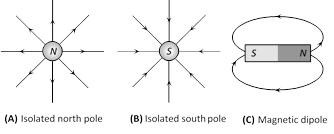 (2) Magnetic flux \[(\phi )\] and flux density (B)
(i) The number of magnetic lines of force passing normally through a surface is defined as magnetic flux \[(\phi )\]. It's S.I. unit is weber (wb) and CGS unit is Maxwell. Remeber \[1\,wb={{10}^{8}}\] Maxwell.
(ii) When a piece of a magnetic substance is placed in an external magnetic field the substance becomes magnetised. The number of magnetic lines of induction inside a magnetised substance crossing unit area normal to their direction is called magnetic induction or magnetic flux density \[(\overrightarrow{B}).\] It is a vector quantity.
(2) Magnetic flux \[(\phi )\] and flux density (B)
(i) The number of magnetic lines of force passing normally through a surface is defined as magnetic flux \[(\phi )\]. It's S.I. unit is weber (wb) and CGS unit is Maxwell. Remeber \[1\,wb={{10}^{8}}\] Maxwell.
(ii) When a piece of a magnetic substance is placed in an external magnetic field the substance becomes magnetised. The number of magnetic lines of induction inside a magnetised substance crossing unit area normal to their direction is called magnetic induction or magnetic flux density \[(\overrightarrow{B}).\] It is a vector quantity.
 It's SI unit is Tesla which is equal to \[\frac{wb}{{{m}^{2}}}=\frac{N}{amp\times m}=\frac{J}{amp\times {{m}^{2}}}=\frac{volt\times \sec }{{{m}^{2}}}\]
and CGS unit is Gauss. Remember 1 Tesla \[={{10}^{4}}\] Gauss.
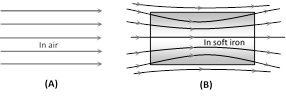
(3) Magnetic permeability : It is the degree or extent to which magnetic lines of force can enter a substance and is denoted by \[\mu \]. Or characteristic of a medium which allows magnetic flux to pass through it is called it's permeability. e.g. permeability of soft iron is 1000 times greater than that of air.
It's SI unit is Tesla which is equal to \[\frac{wb}{{{m}^{2}}}=\frac{N}{amp\times m}=\frac{J}{amp\times {{m}^{2}}}=\frac{volt\times \sec }{{{m}^{2}}}\]
and CGS unit is Gauss. Remember 1 Tesla \[={{10}^{4}}\] Gauss.
(3) Magnetic permeability : It is the degree or extent to which magnetic lines of force can enter a substance and is denoted by \[\mu \]. Or characteristic of a medium which allows magnetic flux to pass through it is called it's permeability. e.g. permeability of soft iron is 1000 times greater than that of air.
 Also \[\mu ={{\mu }_{0}}\,{{\mu }_{r}};\,\] where \[{{\mu }_{0}}=\] absolute permeability of air or free space = \[4\pi \times {{10}^{-7}}tesla\times m/amp.\]
and \[{{\mu }_{r}}=\] Relative permeability of the medium = \[\frac{B}{{{B}_{0}}}=\frac{\text{flux}\,\text{density in material}}{\text{flux density in vacuum}}.\]
(4) Intensity of magnetising field \[\mathbf{(}\overrightarrow{H}\mathbf{)}\] (magnetising field) : It is the degree or extent to which a magnetic field can magnetise a substance. Also \[H=\frac{B}{\mu }\].
It's SI unit is \[A/m.=\frac{N}{{{m}^{2}}\times Tesla}=\frac{N}{wb}=\frac{J}{{{m}^{3}}\times Tesla}=\frac{J}{m\times wb}\]
It's CGS unit is Oersted. Also 1 Oersted = 80 A/m
(5) Intensity of magnetisation (I) : It is the degree to which a substance is magnetised when placed in a magnetic field.
It can also be defined as the pole strength per unit cross sectional area of the substance or the induced dipole moment per unit volume.
Hence \[l=\frac{m}{A}=\frac{M}{V}.\] It is a vector quantity, it's S.I. unit is Amp/m.
(6) Magnetic susceptibility \[({{\chi }_{m}})\] : It is the property of the substance which shows how easily a substance can be magnetised. It can also be defined as the ratio of intensity of magnetisation (I) in a substance to the magnetic intensity (H) applied to the substance, i.e. \[{{\chi }_{m}}=\frac{I}{H}\]. It is a scalar quantity with no units and dimensions.
(7) Relation between permeability and susceptibility : Total magnetic flux density B in a material is the sum of magnetic flux density in vacuum \[{{B}_{0}}\] produced by magnetising force and magnetic flux density due to magnetisation of material \[{{B}_{m}}\]. i.e. \[B={{B}_{0}}+{{B}_{m}}\]\[\Rightarrow \]\[B={{\mu }_{0}}H+{{\mu }_{0}}I={{\mu }_{0}}(H+I)={{\mu }_{0}}H(1+\]\[{{\chi }_{m}})\]. Also \[{{\mu }_{r}}=(1+{{\chi }_{m}})\]
Also \[\mu ={{\mu }_{0}}\,{{\mu }_{r}};\,\] where \[{{\mu }_{0}}=\] absolute permeability of air or free space = \[4\pi \times {{10}^{-7}}tesla\times m/amp.\]
and \[{{\mu }_{r}}=\] Relative permeability of the medium = \[\frac{B}{{{B}_{0}}}=\frac{\text{flux}\,\text{density in material}}{\text{flux density in vacuum}}.\]
(4) Intensity of magnetising field \[\mathbf{(}\overrightarrow{H}\mathbf{)}\] (magnetising field) : It is the degree or extent to which a magnetic field can magnetise a substance. Also \[H=\frac{B}{\mu }\].
It's SI unit is \[A/m.=\frac{N}{{{m}^{2}}\times Tesla}=\frac{N}{wb}=\frac{J}{{{m}^{3}}\times Tesla}=\frac{J}{m\times wb}\]
It's CGS unit is Oersted. Also 1 Oersted = 80 A/m
(5) Intensity of magnetisation (I) : It is the degree to which a substance is magnetised when placed in a magnetic field.
It can also be defined as the pole strength per unit cross sectional area of the substance or the induced dipole moment per unit volume.
Hence \[l=\frac{m}{A}=\frac{M}{V}.\] It is a vector quantity, it's S.I. unit is Amp/m.
(6) Magnetic susceptibility \[({{\chi }_{m}})\] : It is the property of the substance which shows how easily a substance can be magnetised. It can also be defined as the ratio of intensity of magnetisation (I) in a substance to the magnetic intensity (H) applied to the substance, i.e. \[{{\chi }_{m}}=\frac{I}{H}\]. It is a scalar quantity with no units and dimensions.
(7) Relation between permeability and susceptibility : Total magnetic flux density B in a material is the sum of magnetic flux density in vacuum \[{{B}_{0}}\] produced by magnetising force and magnetic flux density due to magnetisation of material \[{{B}_{m}}\]. i.e. \[B={{B}_{0}}+{{B}_{m}}\]\[\Rightarrow \]\[B={{\mu }_{0}}H+{{\mu }_{0}}I={{\mu }_{0}}(H+I)={{\mu }_{0}}H(1+\]\[{{\chi }_{m}})\]. Also \[{{\mu }_{r}}=(1+{{\chi }_{m}})\] 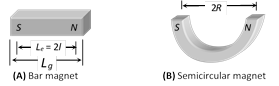 (1) Directive properties : When a magnet suspended freely it stays in the earth's N-S direction (in magnetic meridian).
(1) Directive properties : When a magnet suspended freely it stays in the earth's N-S direction (in magnetic meridian).
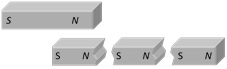
 (2) Monopole concept : If a magnet is Broken into number of pieces, each piece becomes a magnet. This in turn implies that monopoles do not exist. (i.e., ultimate individual unit of magnetism in any magnet is called dipole).
(2) Monopole concept : If a magnet is Broken into number of pieces, each piece becomes a magnet. This in turn implies that monopoles do not exist. (i.e., ultimate individual unit of magnetism in any magnet is called dipole).
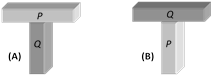
 (3) For two rods as shown, if both the rods attract in figure (A) and doesn't attract in figure (B) then, Q is a magnetic and P is simple iron rod. Repulsion is sure test of magnetism.
(3) For two rods as shown, if both the rods attract in figure (A) and doesn't attract in figure (B) then, Q is a magnetic and P is simple iron rod. Repulsion is sure test of magnetism.
 (4) Pole strength (m) : The strength of a magnetic pole to attract magnetic materials towards itself is known as pole strength.
(i) It is a scalar quantity.
(ii) Pole strength of N and S pole of a magnet is conventionally represented by +m and \[-m\] respectively.
(iii) It's SI unit is amp \[\times \] m or N/Tesla and dimensions are [LA].
(iv) Pole strength of the magnet depends on the nature of material of magnet and area of cross section. It doesn't depends upon length.
(4) Pole strength (m) : The strength of a magnetic pole to attract magnetic materials towards itself is known as pole strength.
(i) It is a scalar quantity.
(ii) Pole strength of N and S pole of a magnet is conventionally represented by +m and \[-m\] respectively.
(iii) It's SI unit is amp \[\times \] m or N/Tesla and dimensions are [LA].
(iv) Pole strength of the magnet depends on the nature of material of magnet and area of cross section. It doesn't depends upon length.
 (5) Magnetic moment or magnetic dipole moment \[(\overrightarrow{M})\] : It represents the strength of magnet. Mathematically it is defined as the product of the strength of either pole and effective length. i.e. \[\overrightarrow{M}=m(2\overrightarrow{\,l\,})\]
(5) Magnetic moment or magnetic dipole moment \[(\overrightarrow{M})\] : It represents the strength of magnet. Mathematically it is defined as the product of the strength of either pole and effective length. i.e. \[\overrightarrow{M}=m(2\overrightarrow{\,l\,})\]
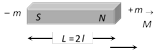 (i) It is a vector quantity directed from south to north.
(ii) It's S.I. unit \[amp\times {{m}^{2}}\] or N-m / Tesla and dimensions \[[A{{L}^{2}}]\]
(6) Cutting of a rectangular bar magnet : Suppose we have a rectangular bar magnet having length, breadth and mass are L, b and w respectively if it is cut in n equal parts along the length as well as perpendicular to the length simultaneously as shown in the figure then
(i) It is a vector quantity directed from south to north.
(ii) It's S.I. unit \[amp\times {{m}^{2}}\] or N-m / Tesla and dimensions \[[A{{L}^{2}}]\]
(6) Cutting of a rectangular bar magnet : Suppose we have a rectangular bar magnet having length, breadth and mass are L, b and w respectively if it is cut in n equal parts along the length as well as perpendicular to the length simultaneously as shown in the figure then
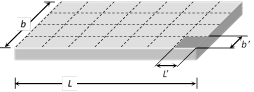 Length of each part \[L'=\frac{L}{\sqrt{n}}\], breadth of each part \[b'=\frac{b}{\sqrt{n}}\] , Mass of each part \[w'=\frac{w}{n}\], pole strength of each part \[m'=\frac{m}{\sqrt{n}}\], Magnetic moment of each part \[M'=m'L'=\frac{m}{\sqrt{n}}\times \frac{L}{\sqrt{n}}=\frac{M}{n}\]
If initially moment of inertia of bar magnet about the axes passing from centre and perpendicular to it's length is \[I=w\,\left( \frac{{{L}^{2}}+{{b}^{2}}}{12} \right)\] then moment of inertia of each part \[I'=\frac{I}{{{n}^{2}}}\]
(7) Cutting of a thin bar magnet : For thin magnet \[b=0\] so \[L'=\frac{L}{n}\], \[w'=\frac{w}{n}\], \[m'=\frac{m}{n}\], \[I'=\frac{I}{{{n}^{3}}}\]
Length of each part \[L'=\frac{L}{\sqrt{n}}\], breadth of each part \[b'=\frac{b}{\sqrt{n}}\] , Mass of each part \[w'=\frac{w}{n}\], pole strength of each part \[m'=\frac{m}{\sqrt{n}}\], Magnetic moment of each part \[M'=m'L'=\frac{m}{\sqrt{n}}\times \frac{L}{\sqrt{n}}=\frac{M}{n}\]
If initially moment of inertia of bar magnet about the axes passing from centre and perpendicular to it's length is \[I=w\,\left( \frac{{{L}^{2}}+{{b}^{2}}}{12} \right)\] then moment of inertia of each part \[I'=\frac{I}{{{n}^{2}}}\]
(7) Cutting of a thin bar magnet : For thin magnet \[b=0\] so \[L'=\frac{L}{n}\], \[w'=\frac{w}{n}\], \[m'=\frac{m}{n}\], \[I'=\frac{I}{{{n}^{3}}}\] 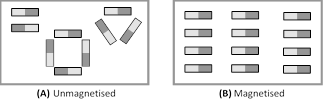
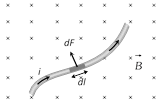 Total magnetic force \[\overrightarrow{F}=\int{d\overrightarrow{F}}=\int{i(d\overrightarrow{l\,}\times \overrightarrow{B})}\]. If magnetic field is uniform i.e., \[\overrightarrow{B}=\] constant \[\overrightarrow{F}=i\,[\int{\overrightarrow{dl}}]\times \overrightarrow{B}=i(\overrightarrow{L}\times \overrightarrow{B})\]
\[\int_{{}}^{{}}{\overrightarrow{dl}}=\overrightarrow{L}'=\] vector sum of all the length elements from initial to final point. Which is in accordance with the law of vector addition is equal to length vector \[\overrightarrow{L}\] joining initial to final point.
(For a straight conductor \[F=Bil\sin \theta \])
Direction of force : The direction of force is always perpendicular to the plane containing \[i\overrightarrow{dl}\] and \[\overrightarrow{B}\] and is same as that of cross-product of two vectors \[(\overrightarrow{A}\times \overrightarrow{B})\] with \[\overrightarrow{A}=i\,\overrightarrow{dl}\].
Total magnetic force \[\overrightarrow{F}=\int{d\overrightarrow{F}}=\int{i(d\overrightarrow{l\,}\times \overrightarrow{B})}\]. If magnetic field is uniform i.e., \[\overrightarrow{B}=\] constant \[\overrightarrow{F}=i\,[\int{\overrightarrow{dl}}]\times \overrightarrow{B}=i(\overrightarrow{L}\times \overrightarrow{B})\]
\[\int_{{}}^{{}}{\overrightarrow{dl}}=\overrightarrow{L}'=\] vector sum of all the length elements from initial to final point. Which is in accordance with the law of vector addition is equal to length vector \[\overrightarrow{L}\] joining initial to final point.
(For a straight conductor \[F=Bil\sin \theta \])
Direction of force : The direction of force is always perpendicular to the plane containing \[i\overrightarrow{dl}\] and \[\overrightarrow{B}\] and is same as that of cross-product of two vectors \[(\overrightarrow{A}\times \overrightarrow{B})\] with \[\overrightarrow{A}=i\,\overrightarrow{dl}\].
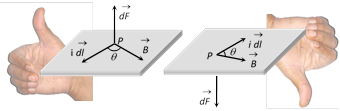 The direction of force when current element \[i\,\overrightarrow{dl}\] and \[\vec{B}\] are perpendicular to each other can also be determined by applying either of the following rules
Fleming's left-hand rule : Stretch the fore-finger, central finger and thumb of left hand mutually perpendicular. Then if the fore-finger points in the direction of field \[\overrightarrow{B}\] and the central in the direction of current i, the thumb will point in the direction of force.
The direction of force when current element \[i\,\overrightarrow{dl}\] and \[\vec{B}\] are perpendicular to each other can also be determined by applying either of the following rules
Fleming's left-hand rule : Stretch the fore-finger, central finger and thumb of left hand mutually perpendicular. Then if the fore-finger points in the direction of field \[\overrightarrow{B}\] and the central in the direction of current i, the thumb will point in the direction of force.
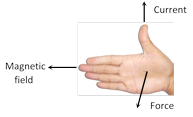
 Right-hand palm rule : Stretch the fingers and thumb of right hand at right angles to each other. Then if the fingers point in the direction of field \[\overrightarrow{B}\] and thumb in the direction of current i, then normal to the palm will point in the direction of force
Right-hand palm rule : Stretch the fingers and thumb of right hand at right angles to each other. Then if the fingers point in the direction of field \[\overrightarrow{B}\] and thumb in the direction of current i, then normal to the palm will point in the direction of force
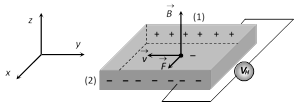 Force acting on electron \[{{F}_{m}}=-e(\overrightarrow{v\,}\times \overrightarrow{B}).\] This force acts along x-axis and hence electrons will move towards face (2) and it becomes negatively charged.
Force acting on electron \[{{F}_{m}}=-e(\overrightarrow{v\,}\times \overrightarrow{B}).\] This force acts along x-axis and hence electrons will move towards face (2) and it becomes negatively charged. 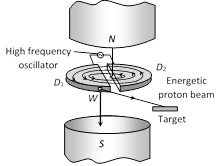 It consists of two hollow D-shaped metallic chambers \[{{D}_{1}}\] and \[{{D}_{2}}\] called dees. The two dees are placed horizontally with a small gap separating them. The dees are connected to the source of high frequency electric field. The dees are enclosed in a metal box containing a gas at a low pressure of the order of \[{{10}^{-3}}\] mm mercury. The whole apparatus is placed between the two poles of a strong electromagnet NS as shown in fig. The magnetic field acts perpendicular to the plane of the dees.
(1) Cyclotron frequency : Time taken by ion to describe a semicircular path is given by \[t=\frac{\pi \,r}{v}=\frac{\pi \,m}{qB}\] If \[T=\] time period of oscillating electric field then \[T=2t=\frac{2\pi \,m}{qB}\] the cyclotron frequency \[\nu =\frac{1}{T}=\frac{Bq}{2\pi m}\]
(2) Maximum energy of particle : Maximum energy gained by the charged particle \[{{E}_{\max }}=\left( \frac{{{q}^{2}}{{B}^{2}}}{2m} \right)\,{{r}^{2}}\] where \[{{r}_{0}}=\] maximum radius of the circular path followed by the positive ion.
It consists of two hollow D-shaped metallic chambers \[{{D}_{1}}\] and \[{{D}_{2}}\] called dees. The two dees are placed horizontally with a small gap separating them. The dees are connected to the source of high frequency electric field. The dees are enclosed in a metal box containing a gas at a low pressure of the order of \[{{10}^{-3}}\] mm mercury. The whole apparatus is placed between the two poles of a strong electromagnet NS as shown in fig. The magnetic field acts perpendicular to the plane of the dees.
(1) Cyclotron frequency : Time taken by ion to describe a semicircular path is given by \[t=\frac{\pi \,r}{v}=\frac{\pi \,m}{qB}\] If \[T=\] time period of oscillating electric field then \[T=2t=\frac{2\pi \,m}{qB}\] the cyclotron frequency \[\nu =\frac{1}{T}=\frac{Bq}{2\pi m}\]
(2) Maximum energy of particle : Maximum energy gained by the charged particle \[{{E}_{\max }}=\left( \frac{{{q}^{2}}{{B}^{2}}}{2m} \right)\,{{r}^{2}}\] where \[{{r}_{0}}=\] maximum radius of the circular path followed by the positive ion. 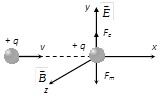 as shown in figure, the particle will pass through the field with same velocity, without any deviation in path.
And in this situation, as \[{{F}_{e}}={{F}_{m}}\] i.e., \[qE=qvB\] \[v=E/B\]
This principle is used in 'velocity-selector' to get a charged beam having a specific velocity.
as shown in figure, the particle will pass through the field with same velocity, without any deviation in path.
And in this situation, as \[{{F}_{e}}={{F}_{m}}\] i.e., \[qE=qvB\] \[v=E/B\]
This principle is used in 'velocity-selector' to get a charged beam having a specific velocity. 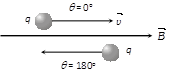 (2) Circular path : If \[\overrightarrow{v}\] is perpendicular to \[\overrightarrow{B}\] i.e. \[\theta ={{90}^{o}},\] hence particle will experience a maximum magnetic force \[{{F}_{\max }}=qvB\] which act's in a direction perpendicular to the motion of charged particle. Therefore the trajectory of the particle is a circle.
(2) Circular path : If \[\overrightarrow{v}\] is perpendicular to \[\overrightarrow{B}\] i.e. \[\theta ={{90}^{o}},\] hence particle will experience a maximum magnetic force \[{{F}_{\max }}=qvB\] which act's in a direction perpendicular to the motion of charged particle. Therefore the trajectory of the particle is a circle.
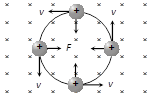 (i) In this case path of charged particle is circular and magnetic force provides the necessary centripetal force i.e. \[qvB=\frac{m{{v}^{2}}}{r}\] \[\Rightarrow \] radius of path \[r=\frac{mv}{qB}=\frac{p}{qB}=\frac{\sqrt{2mK}}{qB}=\frac{\mathbf{1}}{B}\sqrt{\frac{\mathbf{2}mV}{q}}\]
where \[p=\] momentum of charged particle and \[K=\] kinetic energy of charged particle (gained by charged particle after accelerating through potential difference V) then \[p=mv=\sqrt{2mK}=\sqrt{2mqV}\]
(ii) If T is the time period of the particle then \[T=\frac{2\pi m}{qB}\] (i.e., time period (or frequency) is independent of speed of particle).
(3) Helical path : When the charged particle is moving at an angle to the field (other than \[{{0}^{o}},\,\,{{90}^{o}},\] or \[{{180}^{o}}\]). Particle describes a path called helix.
(i) In this case path of charged particle is circular and magnetic force provides the necessary centripetal force i.e. \[qvB=\frac{m{{v}^{2}}}{r}\] \[\Rightarrow \] radius of path \[r=\frac{mv}{qB}=\frac{p}{qB}=\frac{\sqrt{2mK}}{qB}=\frac{\mathbf{1}}{B}\sqrt{\frac{\mathbf{2}mV}{q}}\]
where \[p=\] momentum of charged particle and \[K=\] kinetic energy of charged particle (gained by charged particle after accelerating through potential difference V) then \[p=mv=\sqrt{2mK}=\sqrt{2mqV}\]
(ii) If T is the time period of the particle then \[T=\frac{2\pi m}{qB}\] (i.e., time period (or frequency) is independent of speed of particle).
(3) Helical path : When the charged particle is moving at an angle to the field (other than \[{{0}^{o}},\,\,{{90}^{o}},\] or \[{{180}^{o}}\]). Particle describes a path called helix.
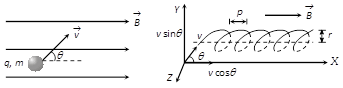 (i) The radius of this helical path is \[\mathbf{r=}\frac{\mathbf{m(vsin\theta )}}{\mathbf{qB}}\]
(ii) Time period and frequency do not depend on velocity and so they are given by \[T=\frac{2\pi \,m}{qB}\] and \[\nu =\frac{qB}{2\pi \,m}\]
(iii) The pitch of the helix, (i.e., linear distance travelled in one rotation) will be given by \[p=T(v\cos \theta )=2\pi \frac{m}{qB}(v\cos \theta )\]
(iv) If pitch value is p, then number of pitches obtained in length l given as
Number of pitches\[=\frac{l}{p}\] and time required \[t=\frac{l}{v\cos \theta }\]
(i) The radius of this helical path is \[\mathbf{r=}\frac{\mathbf{m(vsin\theta )}}{\mathbf{qB}}\]
(ii) Time period and frequency do not depend on velocity and so they are given by \[T=\frac{2\pi \,m}{qB}\] and \[\nu =\frac{qB}{2\pi \,m}\]
(iii) The pitch of the helix, (i.e., linear distance travelled in one rotation) will be given by \[p=T(v\cos \theta )=2\pi \frac{m}{qB}(v\cos \theta )\]
(iv) If pitch value is p, then number of pitches obtained in length l given as
Number of pitches\[=\frac{l}{p}\] and time required \[t=\frac{l}{v\cos \theta }\] 





You need to login to perform this action.
You will be redirected in
3 sec

